


一、適用范圍
本標(biāo)準(zhǔn)適用于工科醫(yī)機器人,包括但不限于焊接機器人、噴涂機器人、搬運機器人、加工機器人、裝配機器人、潔凈機器人、醫(yī)用機器人、教學(xué)和實驗用機器人等。本標(biāo)準(zhǔn)不適用于無人機、玩具、娛樂機器人等。
1.工業(yè)機器人
工業(yè)機器人是面向工業(yè)領(lǐng)域的多關(guān)節(jié)機械手或多自由度的機器裝置,它能自動執(zhí)行工作,是靠自身動力和控制能力來實現(xiàn)各種功能的一種機器。
工業(yè)機器人由主體、驅(qū)動系統(tǒng)和控制系統(tǒng)三個基本部分組成。主體即機座和執(zhí)行機構(gòu),包括臂部、腕部和手部,有的機器人還有行走機構(gòu)。大多數(shù)工業(yè)機器人有3個~6個運動自由度,其中腕部通常有1個~3個運動自由度;驅(qū)動系統(tǒng)包括動力裝置和傳動機構(gòu),用以使執(zhí)行機構(gòu)產(chǎn)生相應(yīng)的動作;控制系統(tǒng)是按照輸入的程序?qū)︱?qū)動系統(tǒng)和執(zhí)行機構(gòu)發(fā)出指令信號,并進行控制。
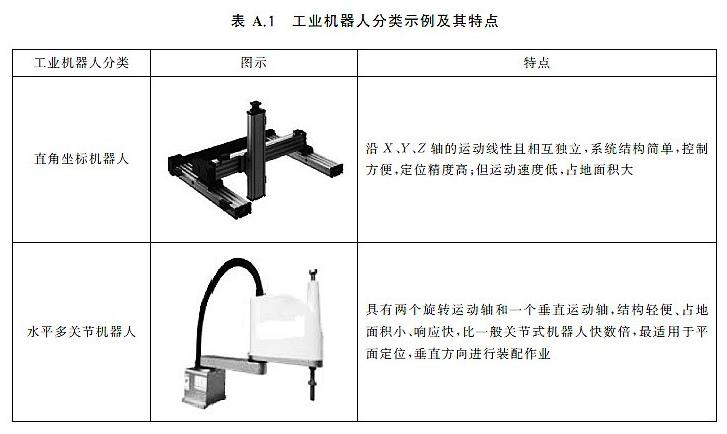
工業(yè)機器人按照本身構(gòu)成可以分為:直角坐標(biāo)機器人、水平多關(guān)節(jié)機器人、關(guān)節(jié)型機器人、柔性機器人、并聯(lián)機器人、無人搬運車等。工業(yè)機器人分類示例及其特點參見表 A.1。

2.醫(yī)用機器人
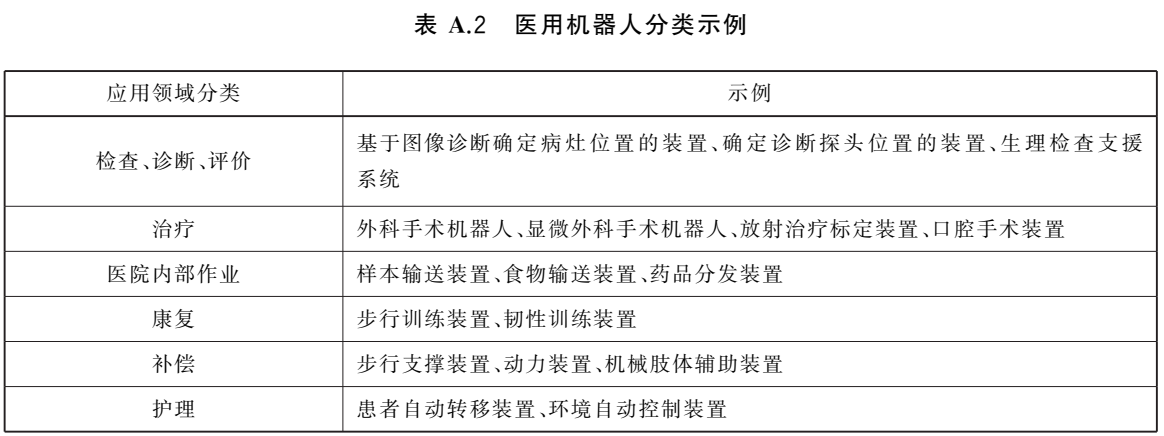
醫(yī)用機器人是指用于醫(yī)院、診所的醫(yī)療或輔助醫(yī)療的機器人。它能獨自編制操作計劃,依據(jù)實際情況確定動作程序,然后把動作變?yōu)椴僮鳈C構(gòu)的運動。醫(yī)用機器人,可識別周圍情況及自身———機器人的意識和自我意識,從事醫(yī)療或輔助醫(yī)療等工作。醫(yī)用機器人分類示例參見表 A.2。
3.科學(xué)機器人
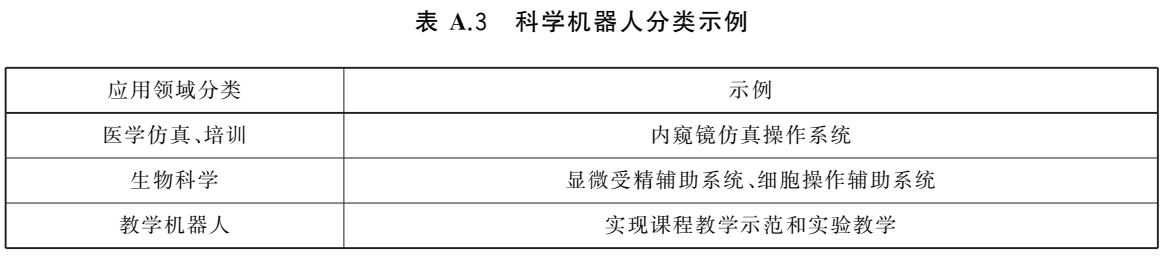
科學(xué)機器人分類示例參見表 A.3。
二、測試模式說明
工科醫(yī)機器人按其安裝方式可分為固定式和移動式,對應(yīng)的試驗運行模式描述如下:
a)固定式工科醫(yī)機器人
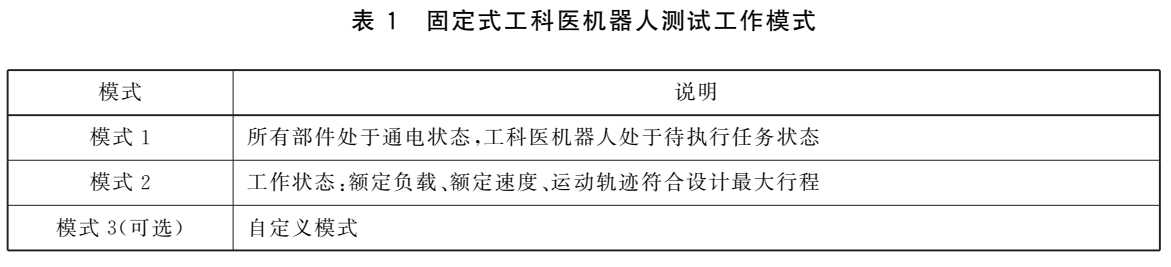
固定式工科醫(yī)機器人按表1適用的工作模式進行試驗。如果模式1和模式2沒有覆蓋最大發(fā)射狀態(tài),則可以選擇自定義模式進行測試,自定義模式的狀態(tài)需要在測試報告中進行描述。
b)移動工科醫(yī)機器人
移動工科醫(yī)機器人應(yīng)在充電模式和工作模式下分別進行測試。試驗?zāi)J饺绫?所示。測試模式的選擇應(yīng)遵循以下原則:
1)如果模式1和模式2不能涵蓋最大發(fā)射狀態(tài),則可選擇自定義模式進行測試,自定義模式的狀態(tài)需要在測試報告中進行描述。
2)工科醫(yī)機器人在接通電源或充電時可以正常工作,測試模式應(yīng)在連接電源或充電時按模式2進行。
3)如果工科醫(yī)機器人在充電和內(nèi)部電池供電狀態(tài)下均能正常工作,則應(yīng)在兩種狀態(tài)的工作模式下進行測試,不需要進行模式1,并在報告中注明具體的工作狀態(tài)。
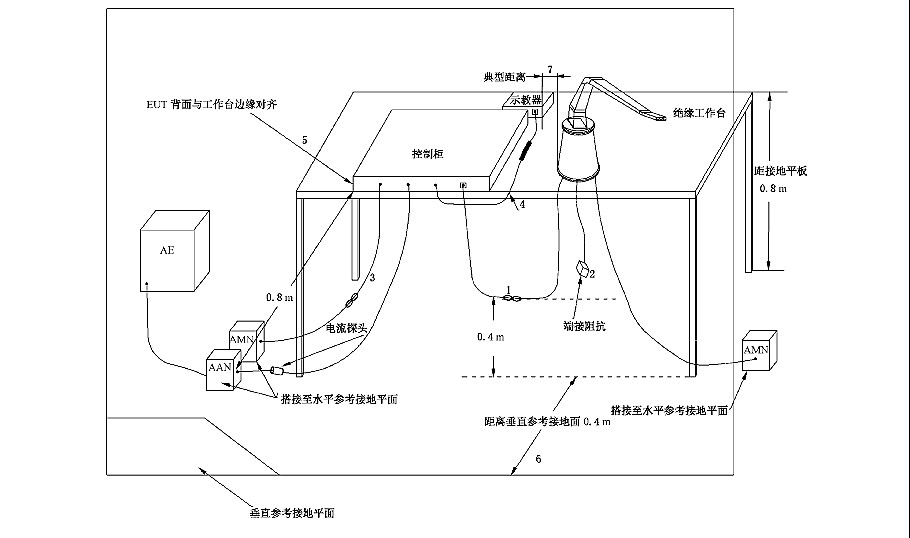
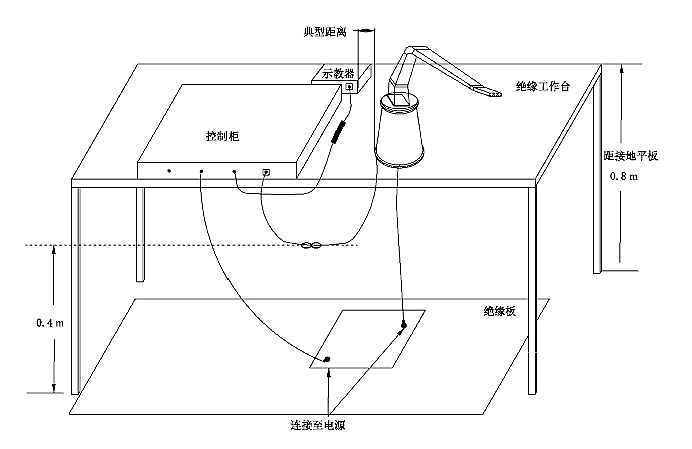
三、測試布置
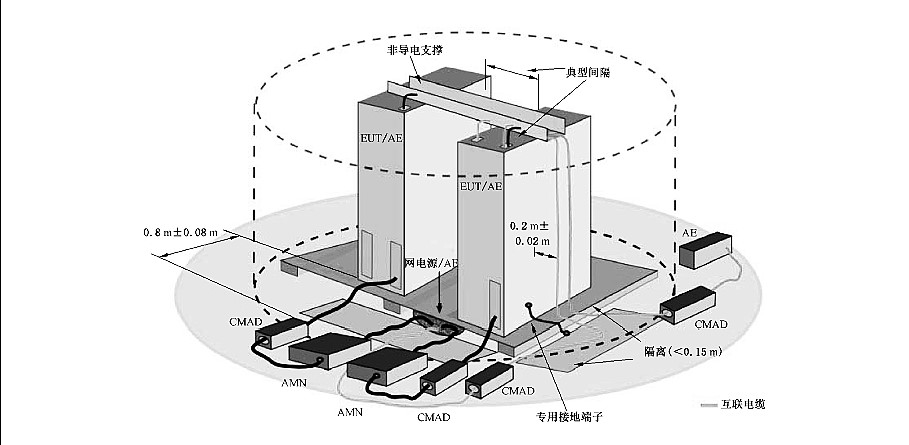
(1)傳導(dǎo)測試布置
固定式EUT臺式測試布置
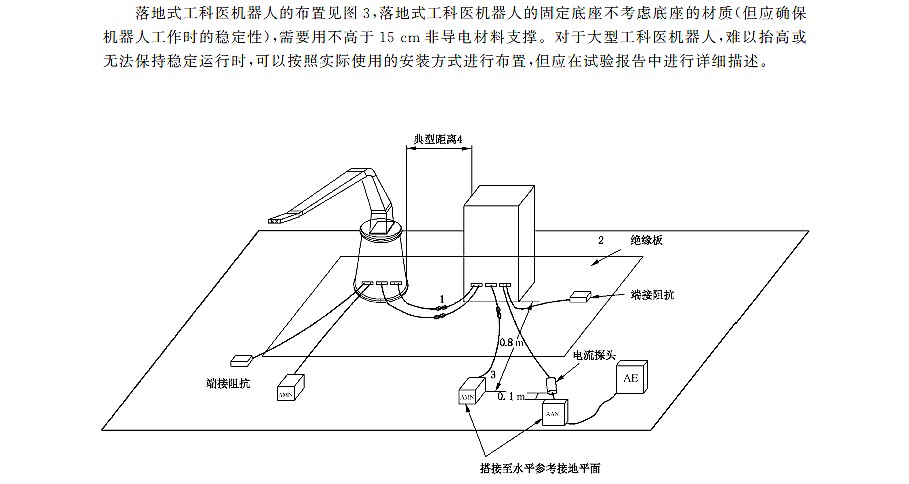
固定式EUT落地式測試布置
(2)輻射測試布置
固定式EUT臺式測試布置
固定式EUT落地式測試布置
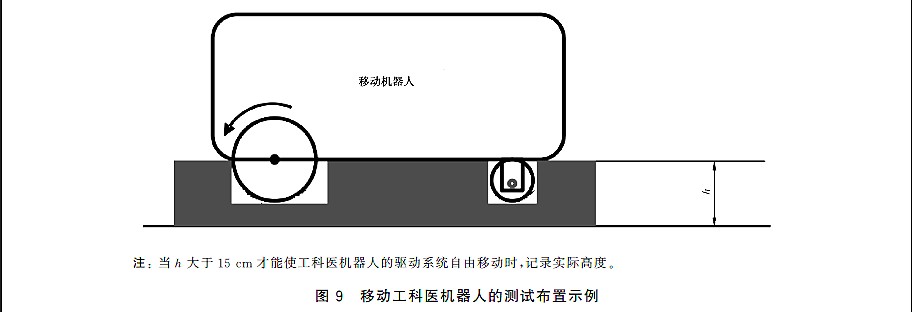
(3)移動式工科醫(yī)機器人測試布置
移動工科醫(yī)機器人的工作狀態(tài)分為充電模式和工作模式。移動工科醫(yī)機器人應(yīng)由絕緣材料支撐(高度不超過15cm),使工科醫(yī)機器人的驅(qū)動系統(tǒng)能夠自由移動。如果絕緣支架高度不足以使移動輪懸空,應(yīng)增加到移動輪懸空的高度,并在報告中記錄實際支架高度。測量布置如圖9所示。
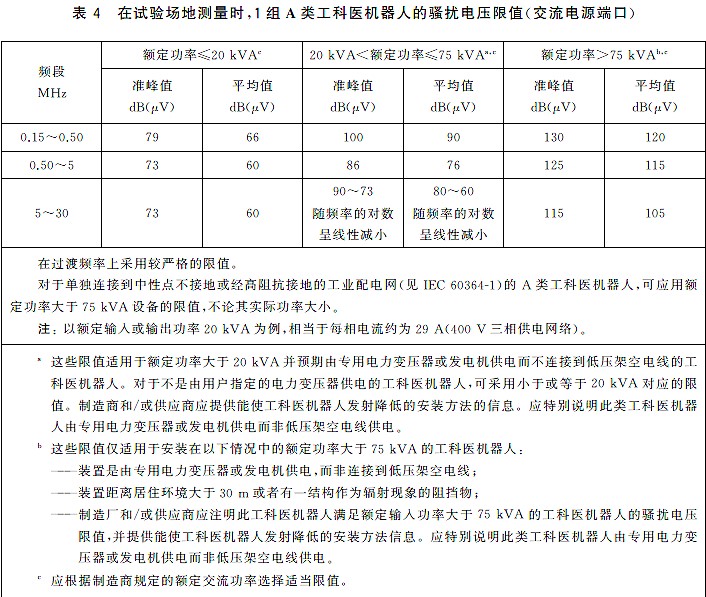
四、測試限值
(1)傳導(dǎo)測試限值
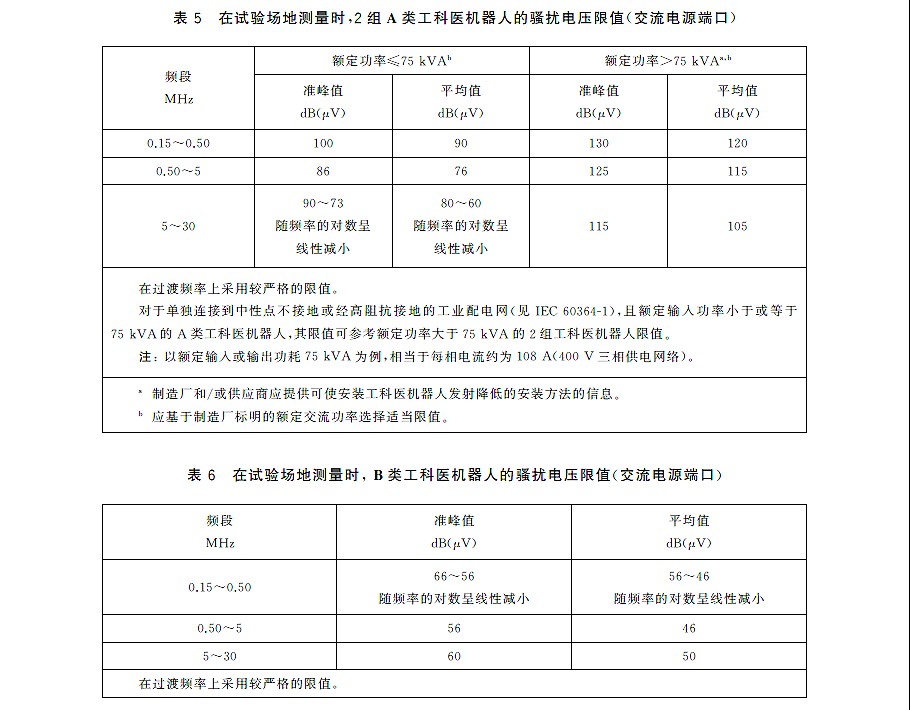
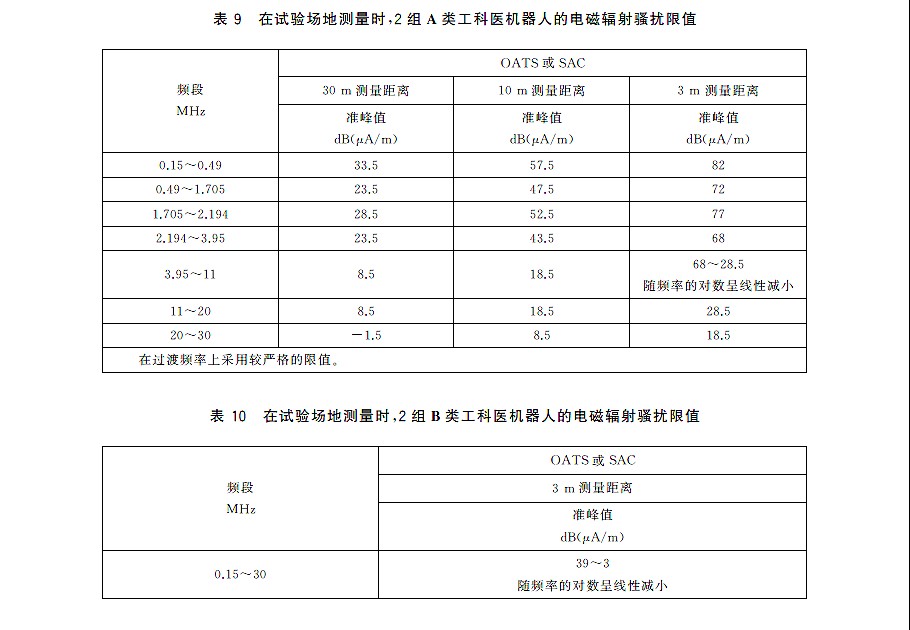
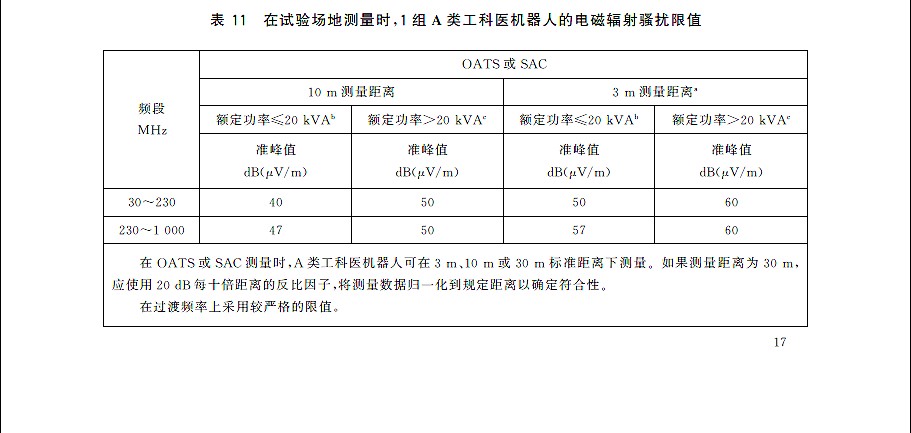
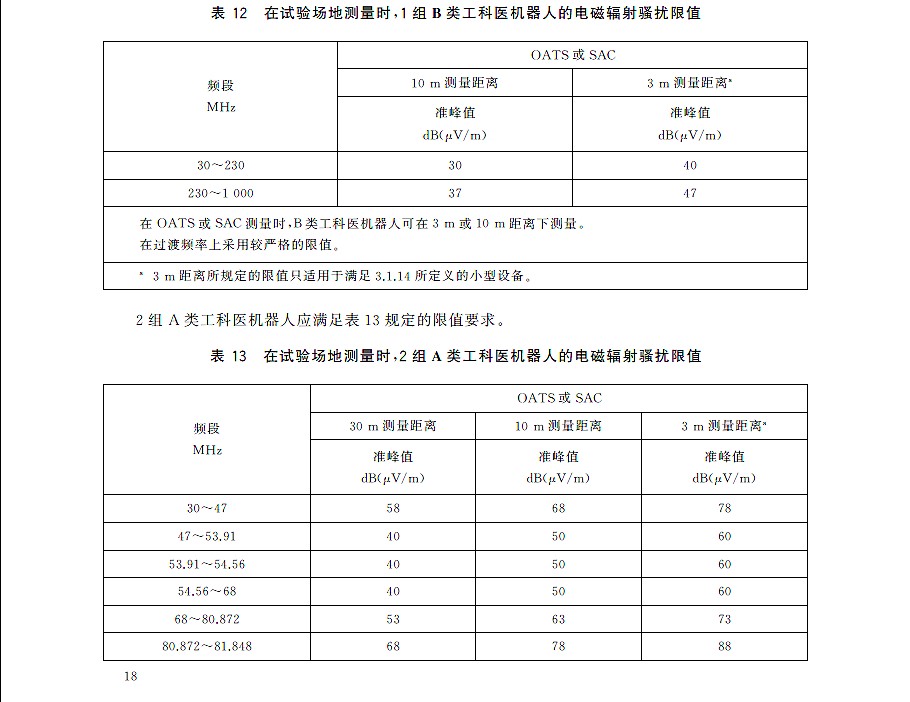
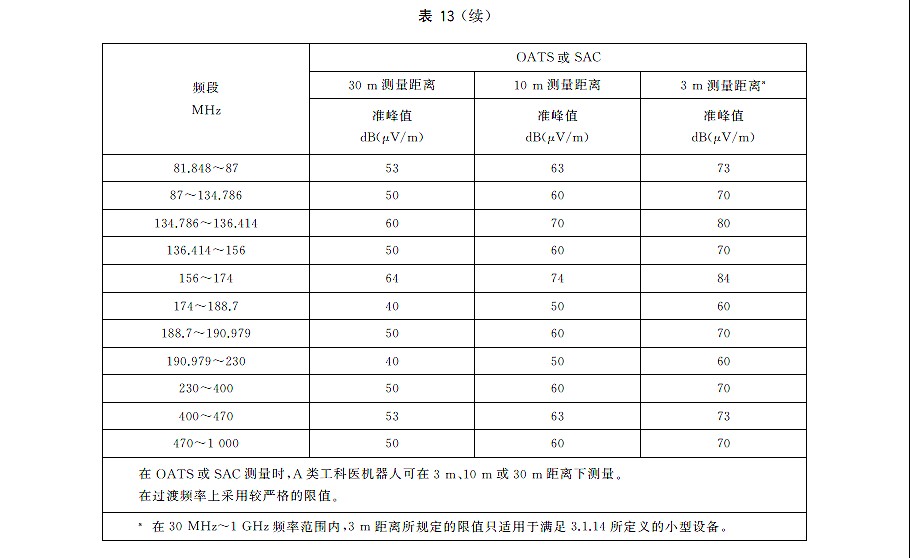
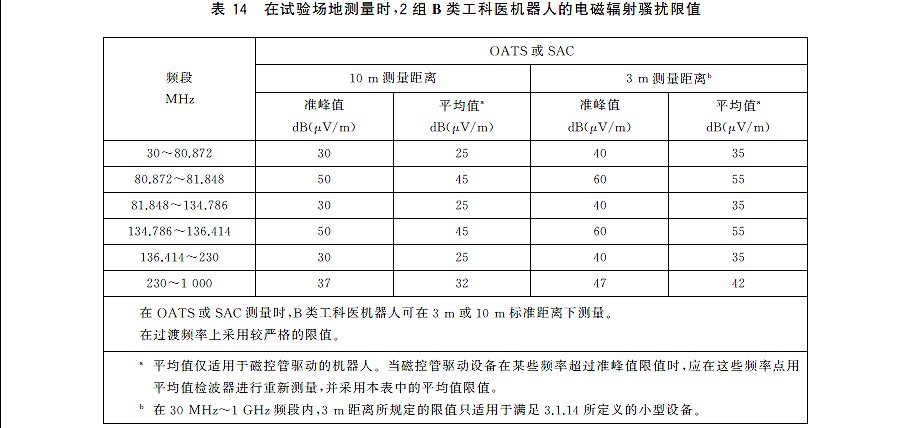
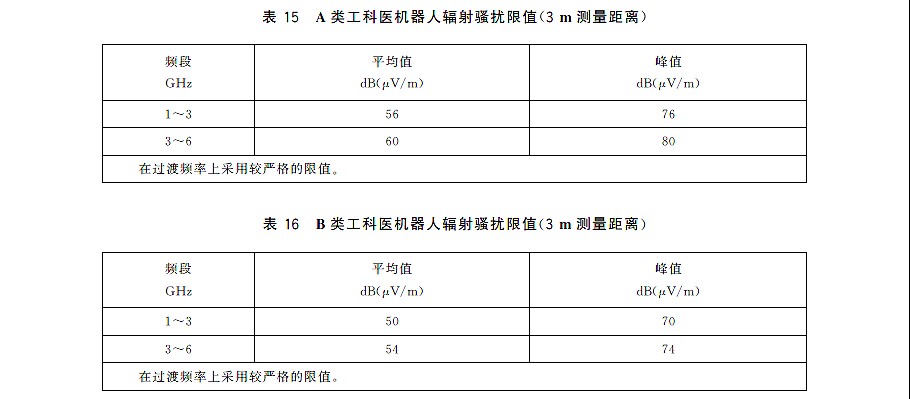
(2)輻射測試限值
我們秉承科學(xué)嚴謹?shù)墓ぷ鲬B(tài)度,以客戶為中心,高效統(tǒng)籌安排測試計劃,竭力縮短測試時間的周期,為客戶提供快捷、公正的第三方咨詢檢測等服務(wù)。服務(wù)區(qū)域遍布廣東廣州、深圳、東莞、佛山、中山、珠海、清遠、惠州、茂名、揭陽、梅州、江門、肇慶、汕頭、潮州、河源、韶關(guān)及全國各地如您有相關(guān)產(chǎn)品需要咨詢,歡迎您直接來電咨詢我司工作人員,獲得詳細的費用報價與周期方案等信息,深圳訊科期待您的光臨!